在本文中虚拟实践系统研究的内容为:
1)以连杆机构为研究对象,在SolidWorks中虚拟出各种常用连杆机构的三维模型,存放在模型库中;
2)研究常用连杆机构构成方案,并建立其运动和动力学数学模型,能够进行可视化分析;
3)模型库中零件的参数可以根据需要进行参数化修改,利用SolidWorks里现有的尺寸驱动功能方便地进行模型重建;
4)所建立的机构可以用COSMOSMotion插件进行模拟仿真,能够对机构在运动中发生的干涉进行检查,然后反复修改相应的参数最终达到消除干涉的目的。
1开发工具的选择及系统开发总体结构
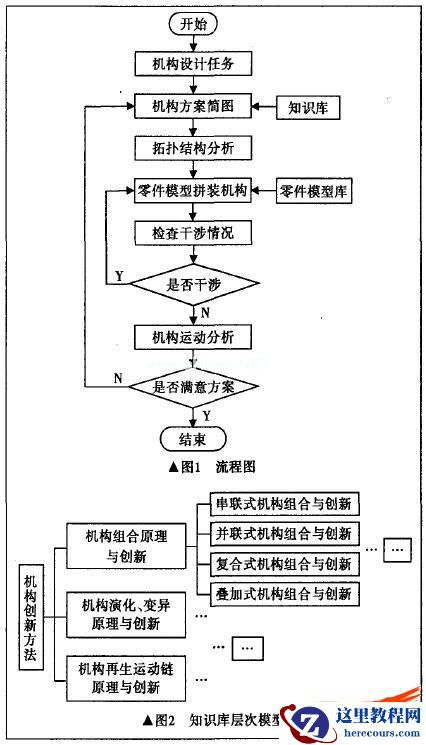
虚拟创新实践系统选用SolidWork。软件作为三维造型的软件平台。Solidworks拥有丰富的应用编程接口(Application Programming Interlace, API) ,是一个基于OLE Automation的编程接口,包含了数以百计的功能函数,可以方便地被高级编程语言调用,内嵌VBA二次开发环境,可以开发我们所需要的应用软件。任何支持OLE和COM的编程环境都可以作为SolidWork,的开发工具。SolidWorks二次开发分为两种,一种是基于自动化技术的,另一种是基于COM的。COM技术可以使用最多的SolidWorks API,并且可以控制SolidWorks的运行方式,生成*. DLL格式的文件,也就是SolidWorks的插件。根据SolidWorks的特点,按照虚拟实践的任务设计了系统运行的流程图,如图1所示。
2创新机构知识库的建立
知识库通常由一条条的经验法则构成,我们将机构创新的方法进行归纳成几个大类,用图2表示。
知识库建立以后,用户利用知识库中的创新原理来为机构制定组成方案,根据每种机构的特性来选择基本的机构,使几种简单的机构拼装在一起后成为所需要的机器。