???? 自适应陷波与均衡教科书级仿真平台
MATLAB 全链路实验工程 · 干扰抑制 + 监督均衡 + 盲均衡 支持 ANF/LMS/CMA 三类经典自适应算法 · 完整可视化产物 · 一键运行
???? 为什么选择本仿真平台?
做自适应滤波与均衡实验时,常见问题是:算法有了,但流程不闭环、图像不成体系、参数对比不成系统,最后只能“看懂代码片段”,却很难完成完整实验复现。本项目的定位是提供一套 从输入建模到性能分析再到图像产出 的完整实验平台,适合课程实验、算法验证与工程原型分析。
| 常见痛点(零散脚本) | 本项目解决方案 |
|---|---|
| ???? 只给单个算法函数,缺少完整实验流程 | ✅ 提供
run_all_demos.m一键串联 A/B/C 三大实验链路 |
| ???? 参数试验靠手改,缺少系统对比 | ✅ A1/B5 提供参数扫描与多组对比图 |
| ???? 只看时域波形,无法解释频域行为 | ✅
compute_dtft.m+ 频域/脉冲/零极点多视角分析 |
| ???? 盲均衡效果难判断 | ✅ 提供常模误差、相位翻转修正与均衡前后对比 |
| ???? 输出结果分散不可复用 | ✅ 结果统一输出到
output/notch_filter、 output/lms_equalizer、 output/cma_equalizer |
???? 核心价值
???? 学术研究价值
-
算法覆盖完整:ANF(陷波)+ LMS(监督均衡)+ CMA(盲均衡)
场景设计完整:固定干扰、频率漂移、多干扰级联、训练/测试分离、参数鲁棒性扫描
分析维度完整:时域、频域、抽头收敛、等效 LTI、零极点
实验可复现:固定随机种子与明确参数配置
???? 工程应用价值
-
模块解耦清晰:
demo/(场景)与
filters//
equalizers/(算法)分离 可快速迁移:核心函数签名清晰,可接入新信道模型 输出即报告素材:25 张图可直接用于实验报告/课程答辩 易二次开发:目录结构规整,函数职责边界明确
⚡ 技术亮点
????️ 完整模块架构
notch_filter/ ├── run_all_demos.m # 一键运行总入口 │ ├── demo/ │ ├── demo_notch_filter.m # A1/A2/A3: 陷波抑制与频率跟踪 │ ├── demo_lms_equalizer.m # B1~B5: LMS训练/测试/鲁棒性 │ └── demo_cma_equalizer.m # C1~C4: CMA盲均衡全流程 │ ├── filters/ │ ├── adaptive_notch_filter.m # 二阶IIR自适应陷波 │ └── adaptive_notch_filter_helper.m # 级联陷波单步更新辅助 │ ├── equalizers/ │ ├── lms_equalizer.m # LMS FIR均衡核心函数 │ └── cma_blind_equalizer.m # CMA盲均衡核心函数(可复用) │ ├── utils/ │ └── compute_dtft.m # 频谱分析工具函数 │ └── output/ ├── notch_filter/ # A系列图像 7张 ├── lms_equalizer/ # B系列图像 10张 └── cma_equalizer/ # C系列图像 8张
???? 三条实验链路(深度分析)
A 链路:自适应陷波(ANF)
-
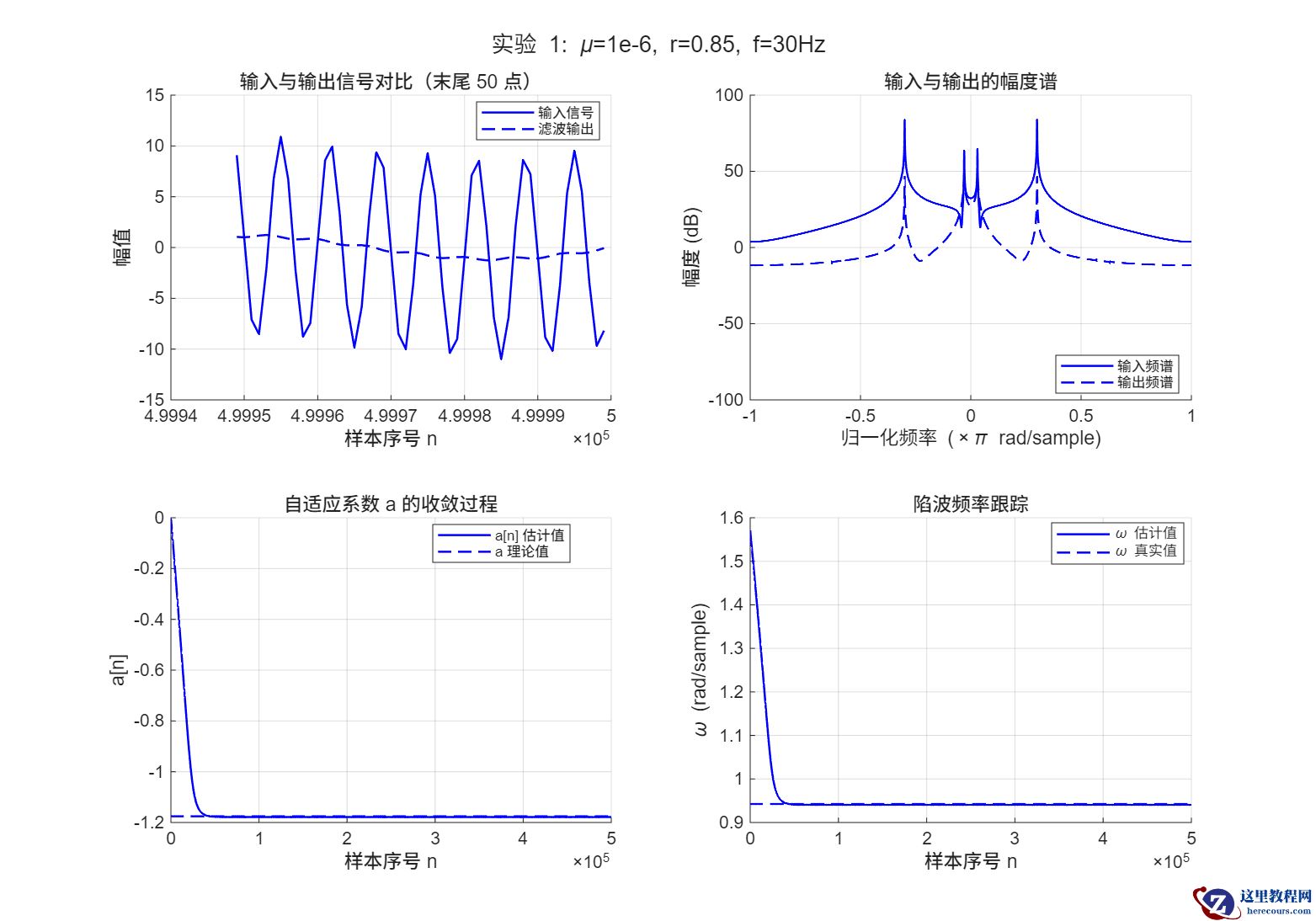
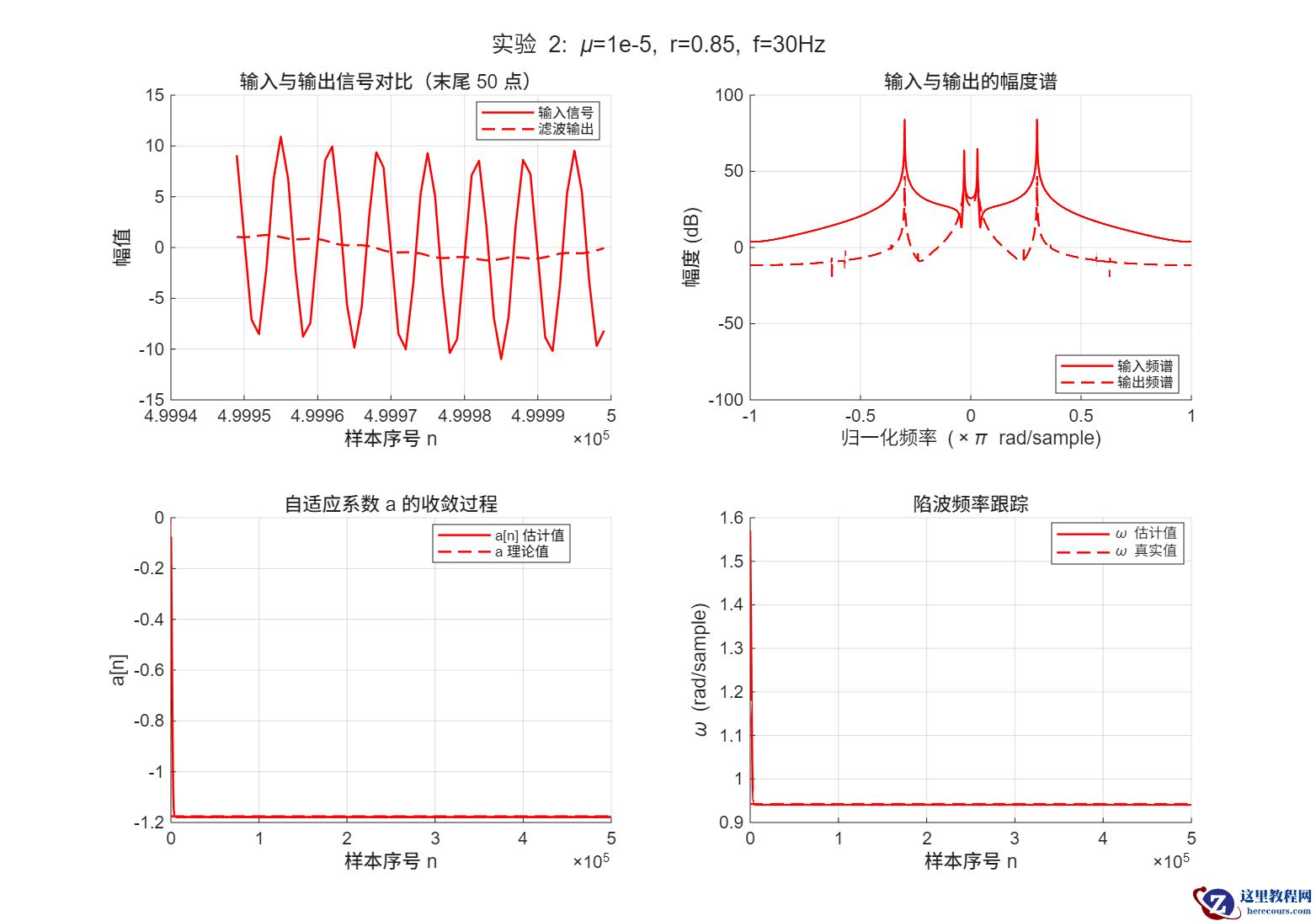
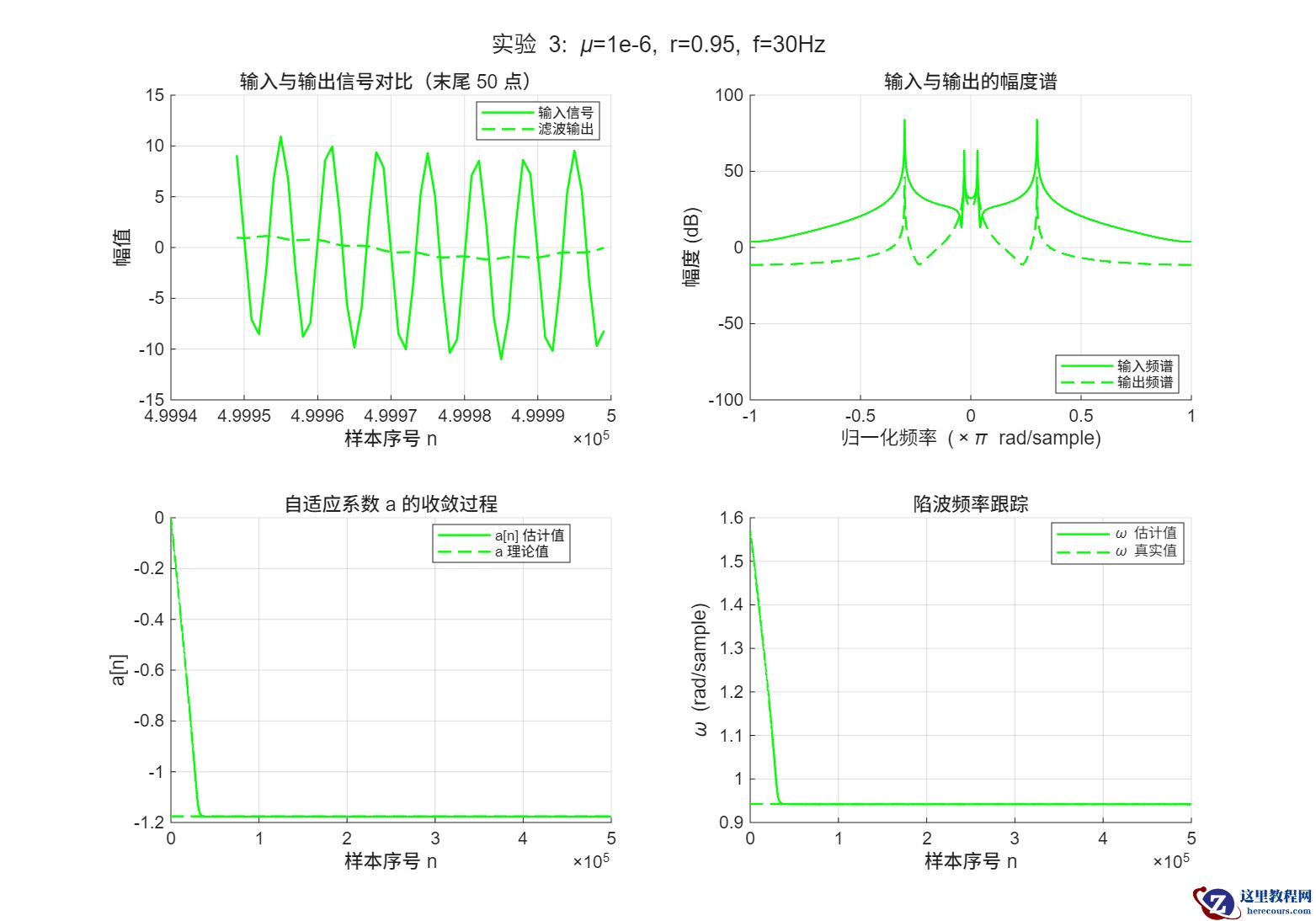
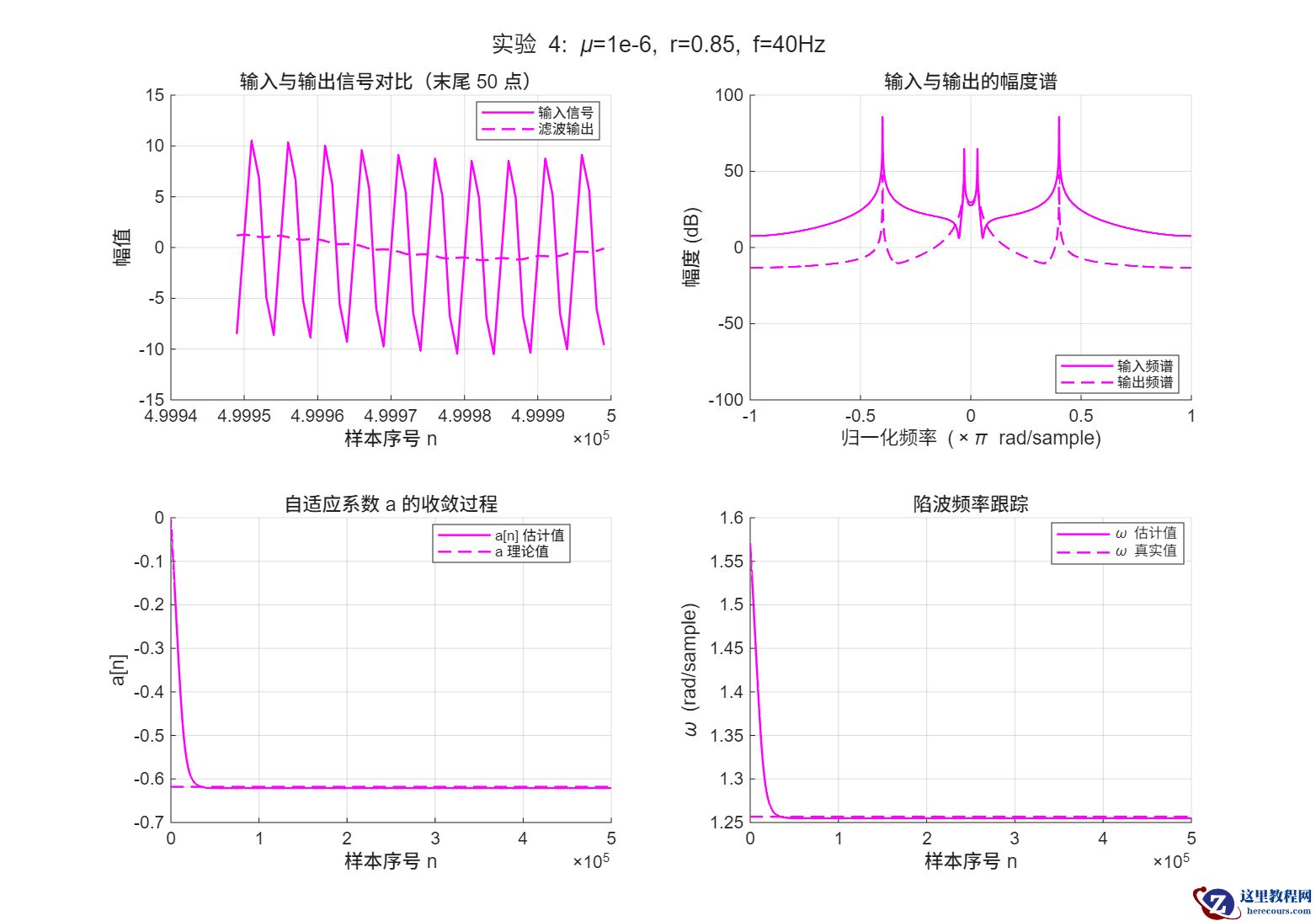
A1 固定频率干扰:4 组参数对比
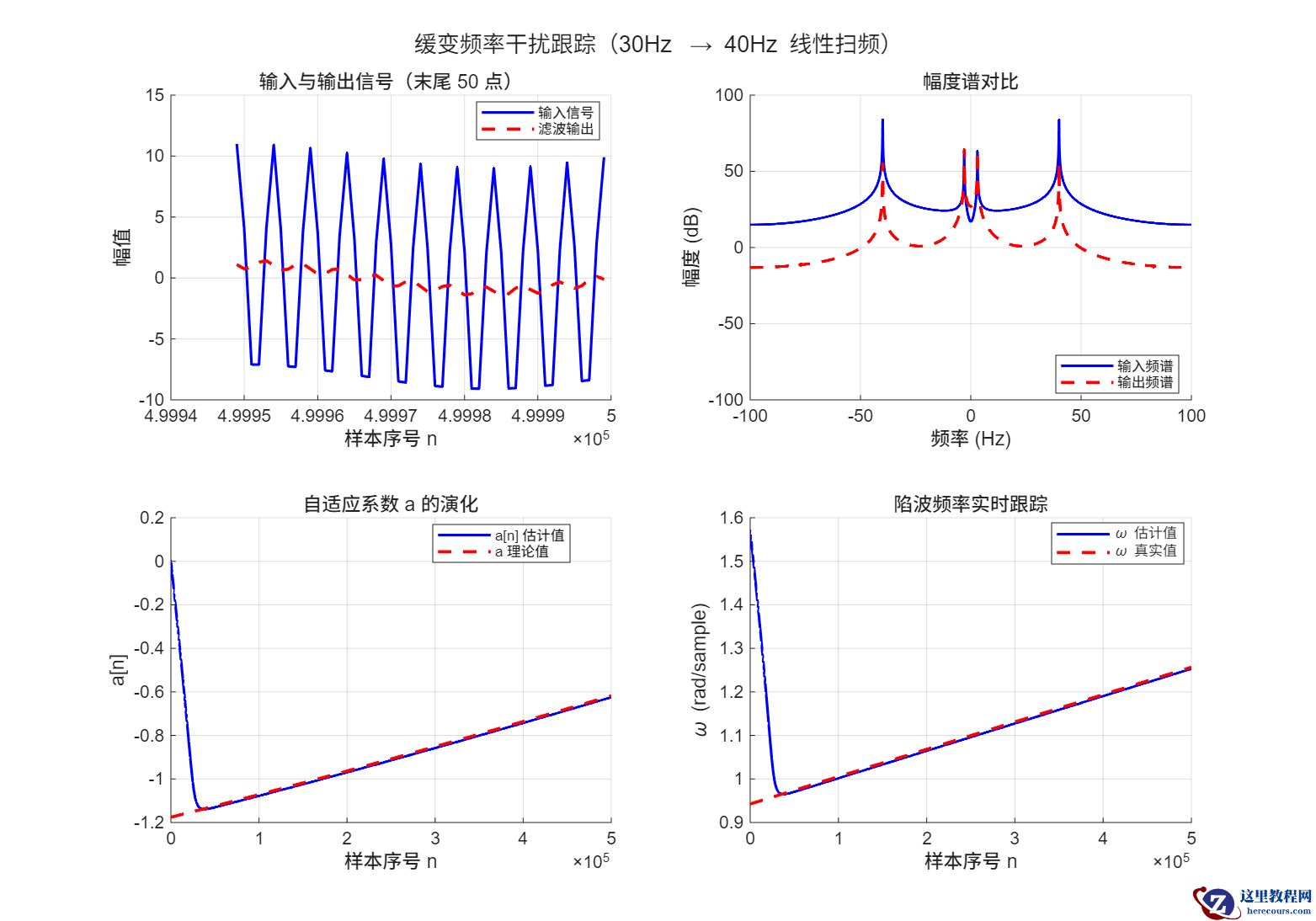
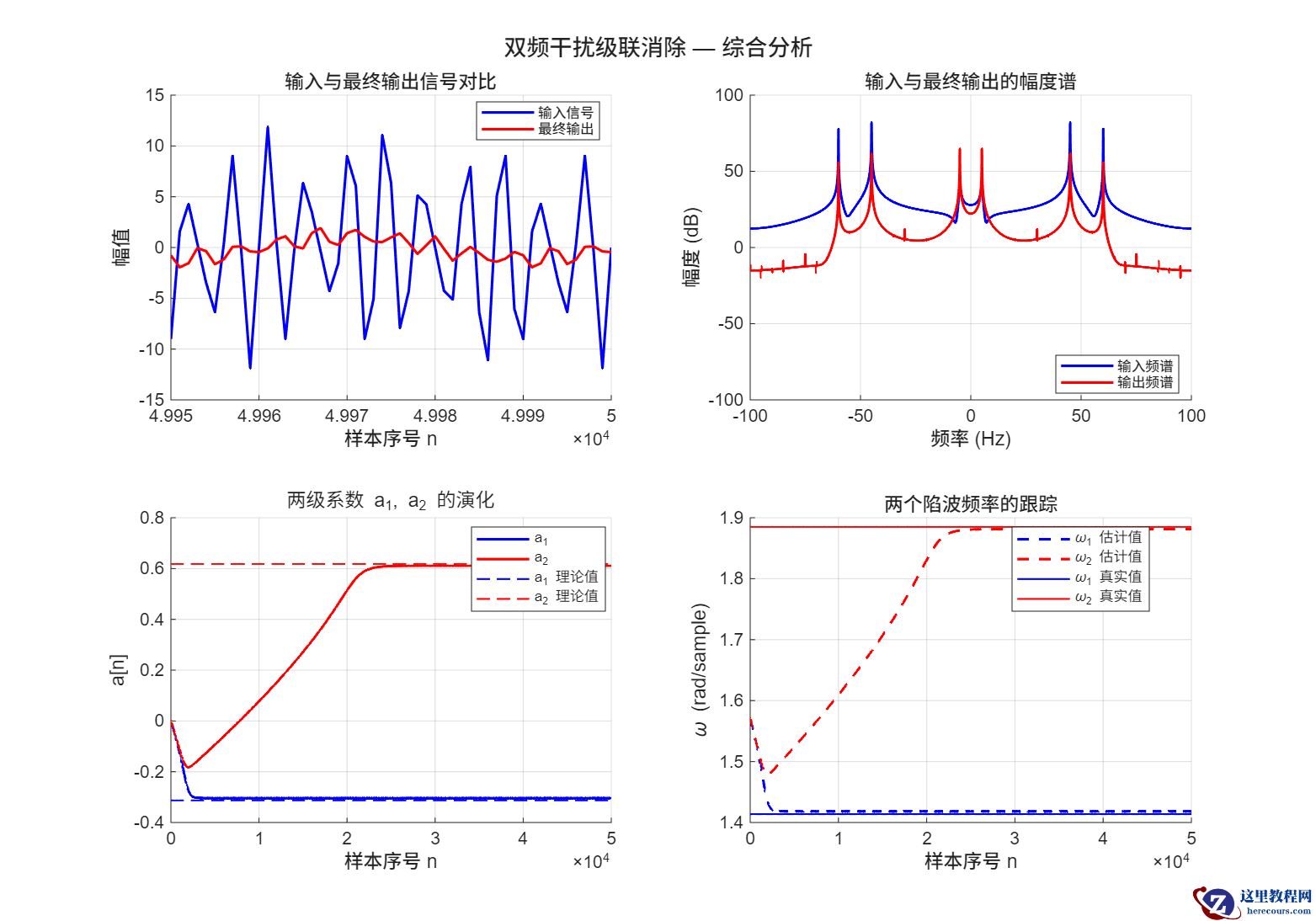
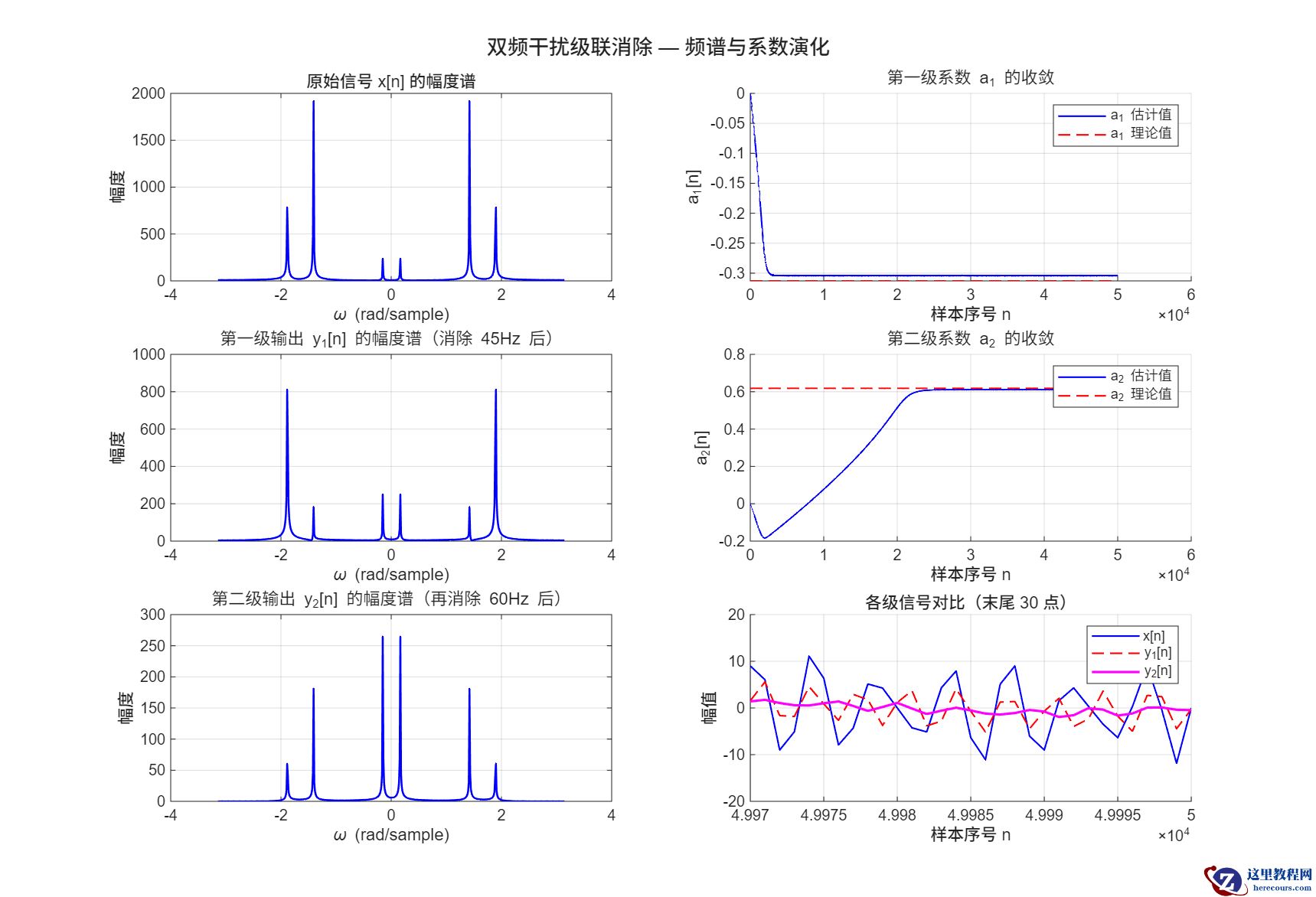
mu/r/f_noiseA2 漂移频率干扰:30Hz 到 40Hz 线性扫频跟踪 A3 双频级联抑制:45Hz + 60Hz 两级串联陷波
核心观察量:
a[n]收敛、
omega_est跟踪、频谱陷波深度。
B 链路:LMS 监督均衡
-
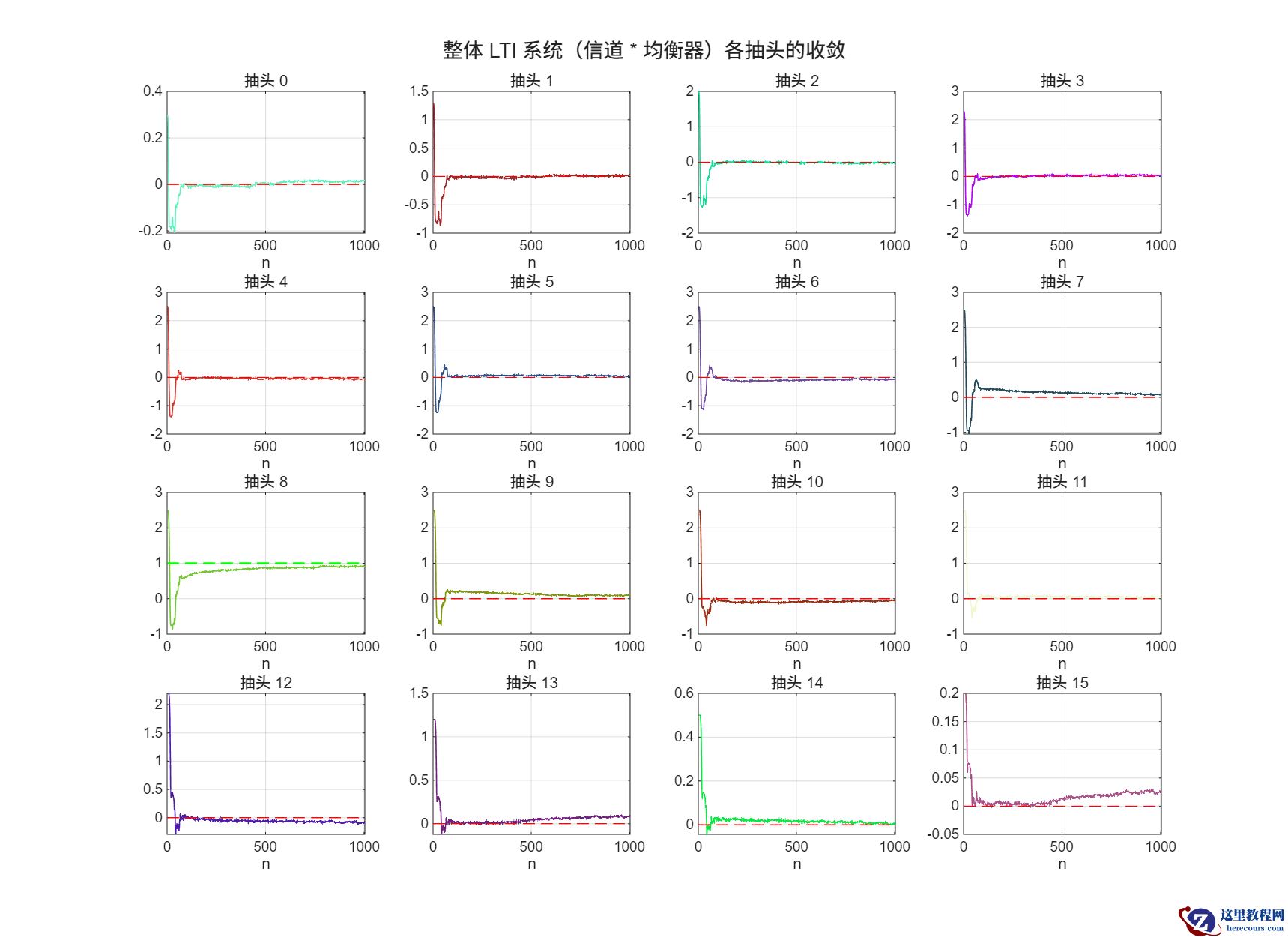
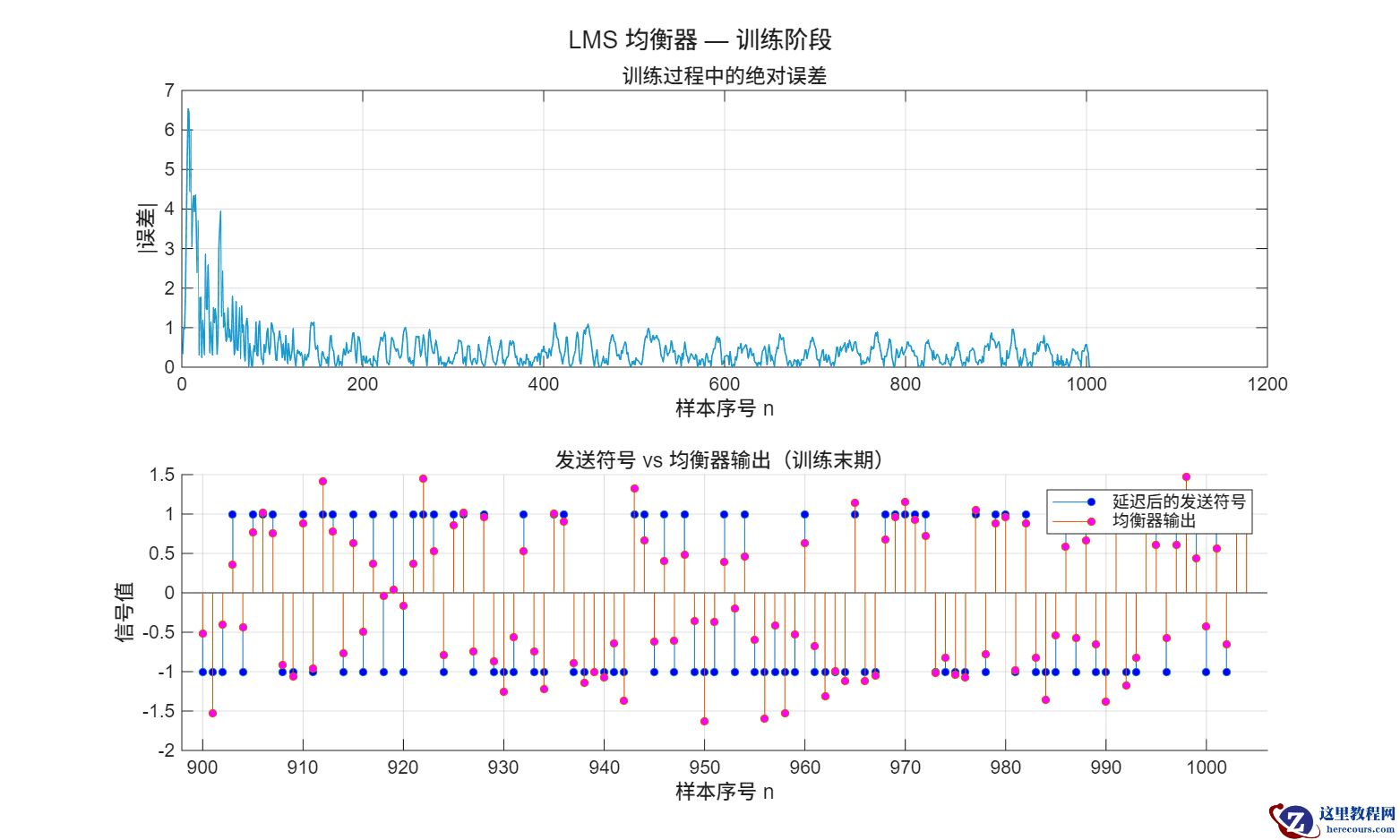
B1 训练收敛:误差衰减、抽头收敛、整体 LTI 收敛
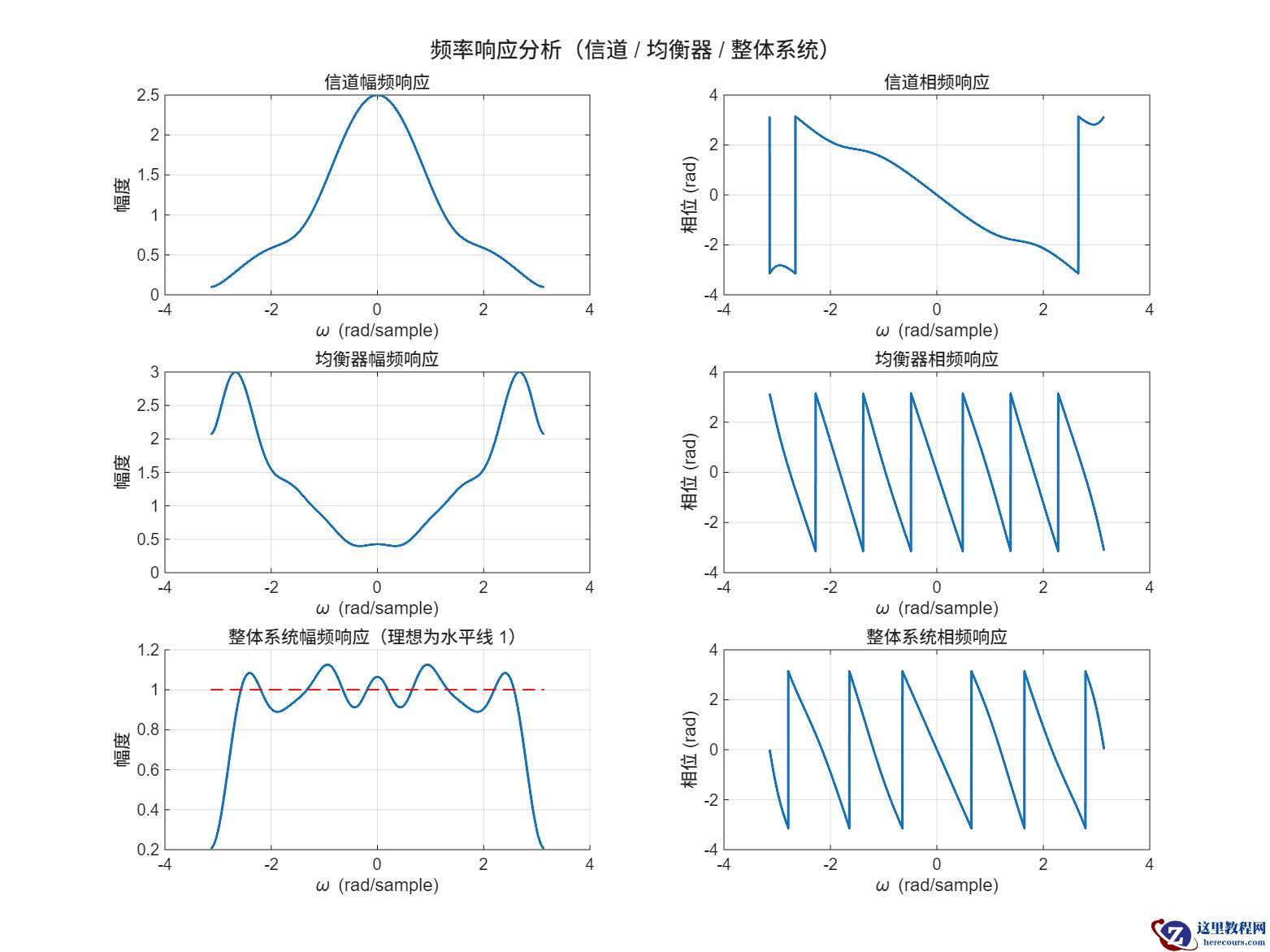
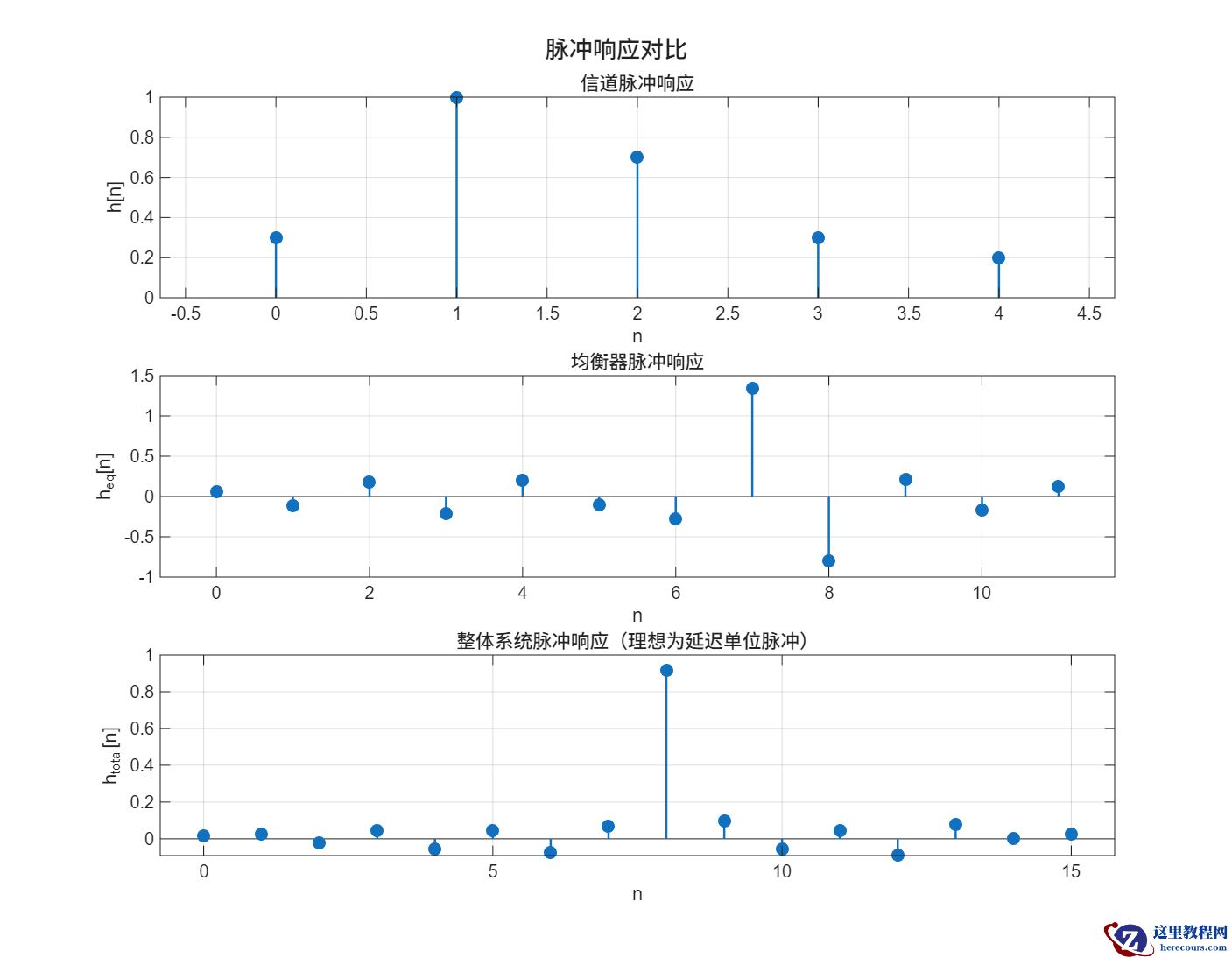
B2 频域分析:信道/均衡器/级联系统频响
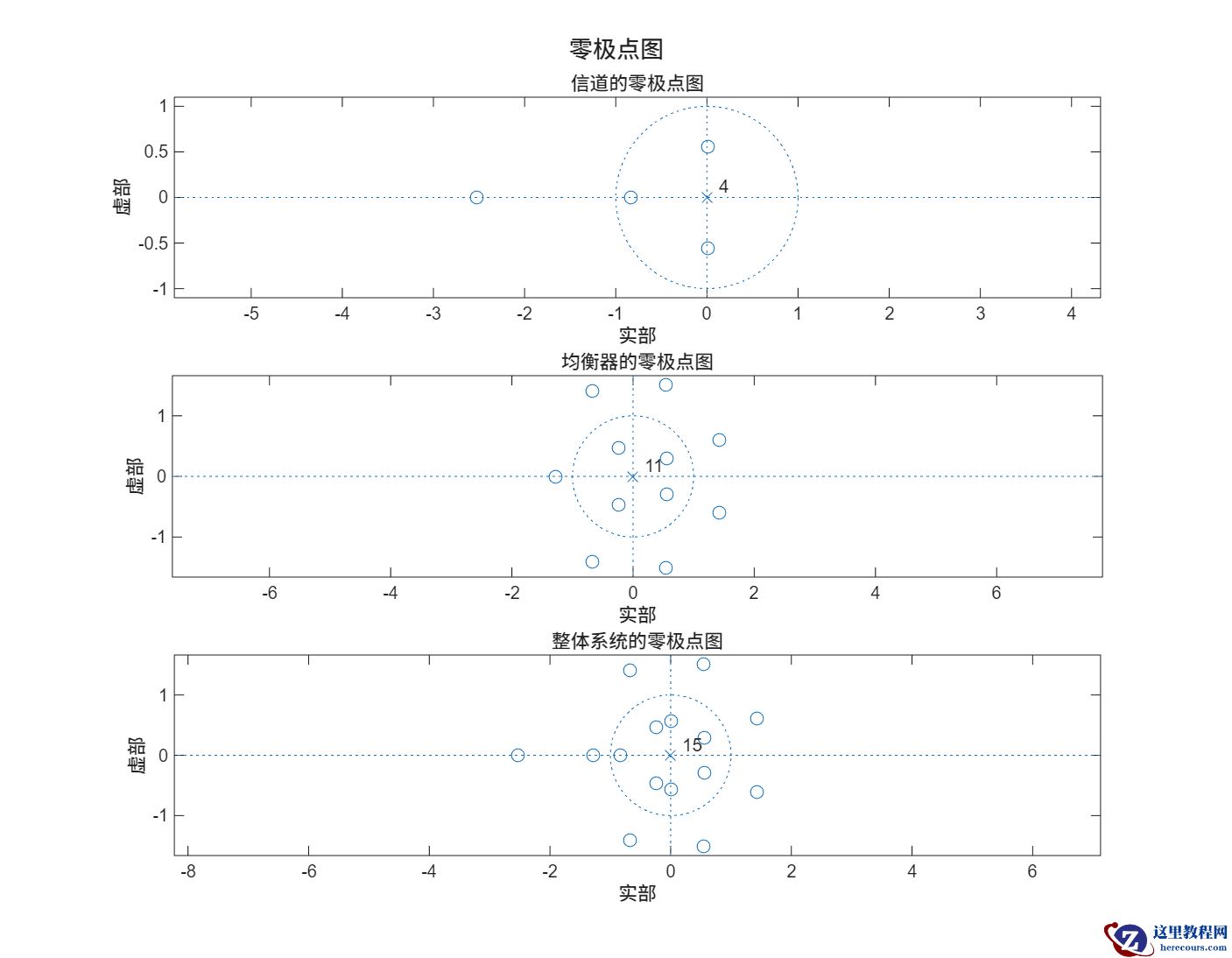
B3 结构分析:零极点分布
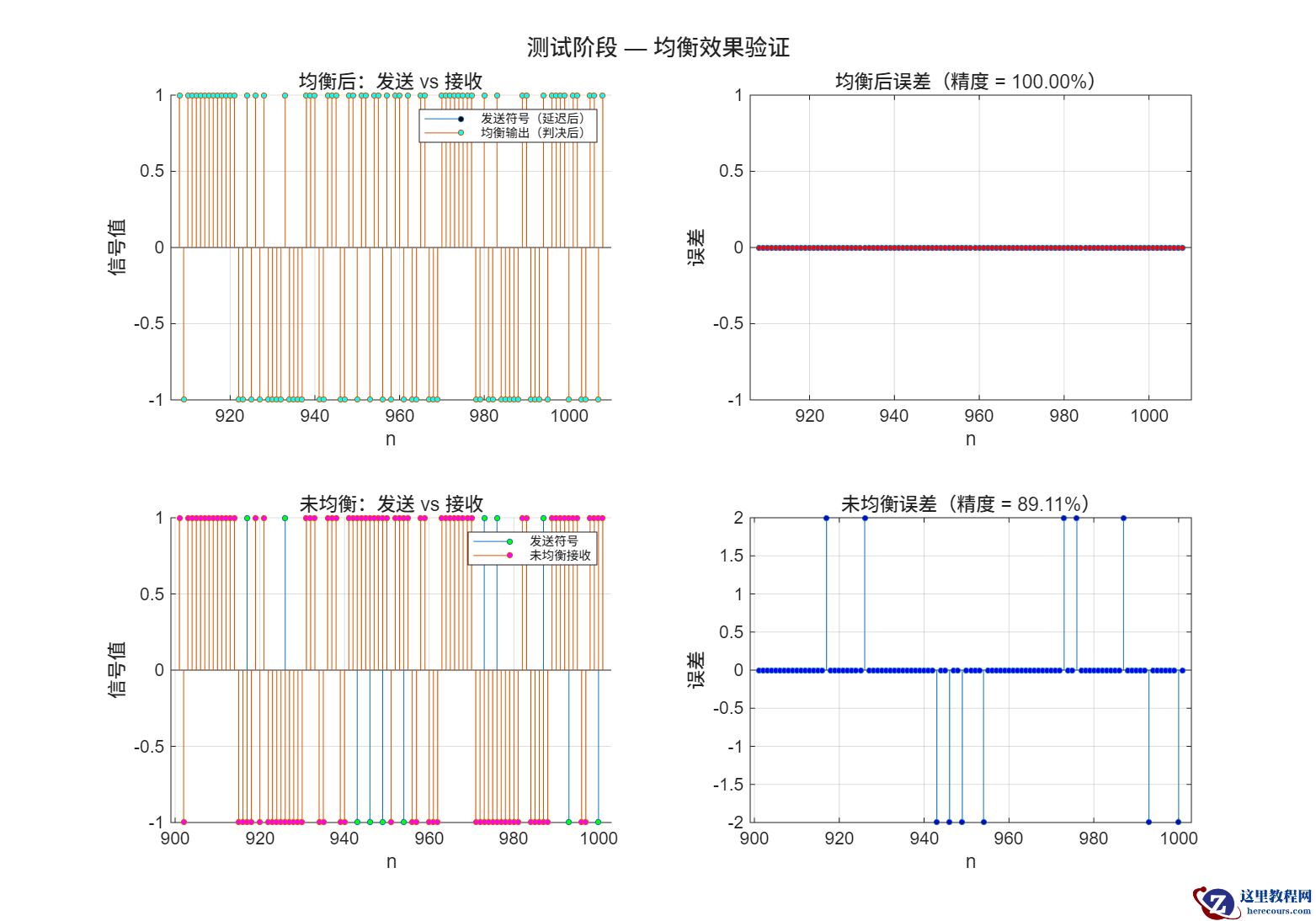
B4 测试验证:均衡前后判决对比
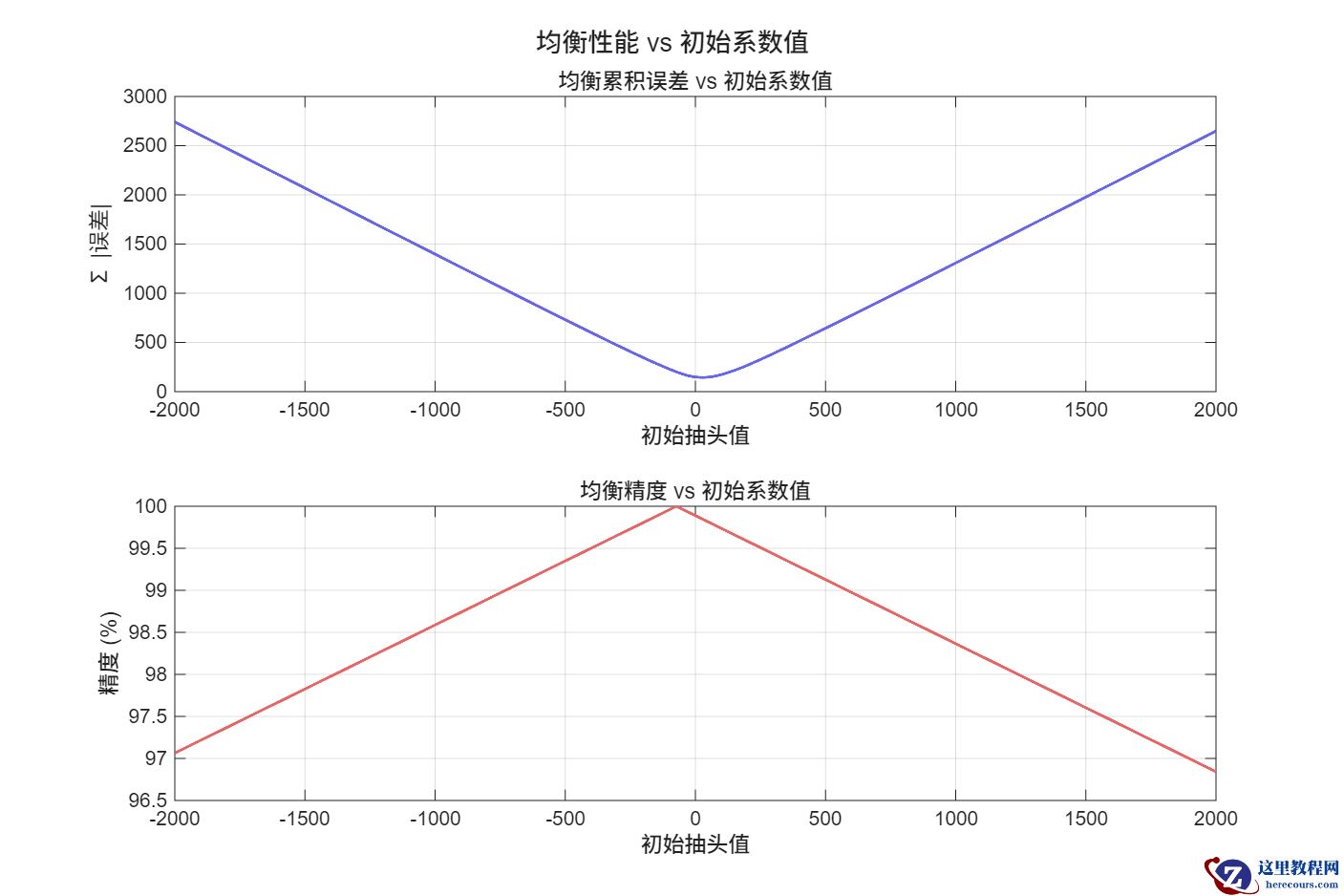
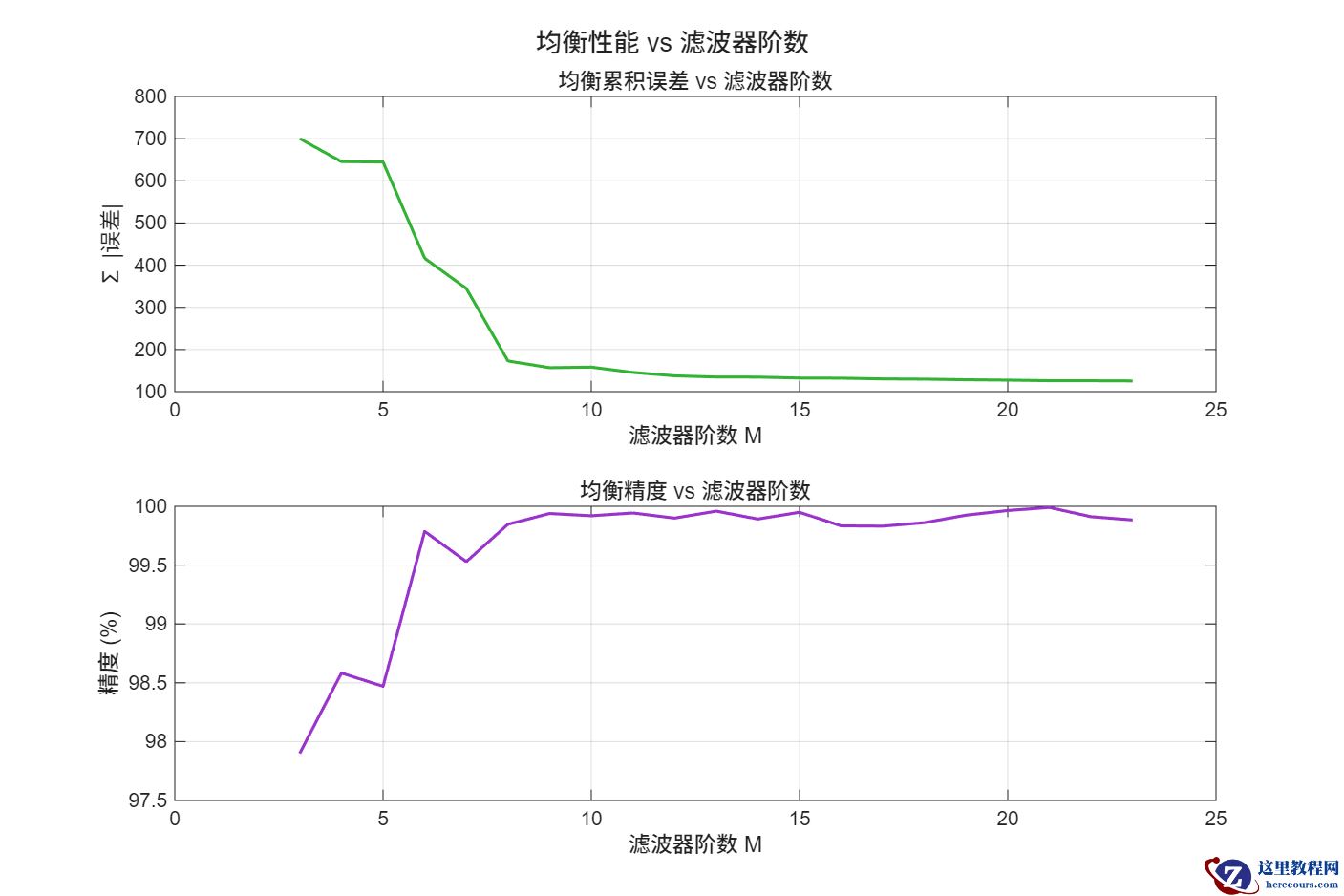
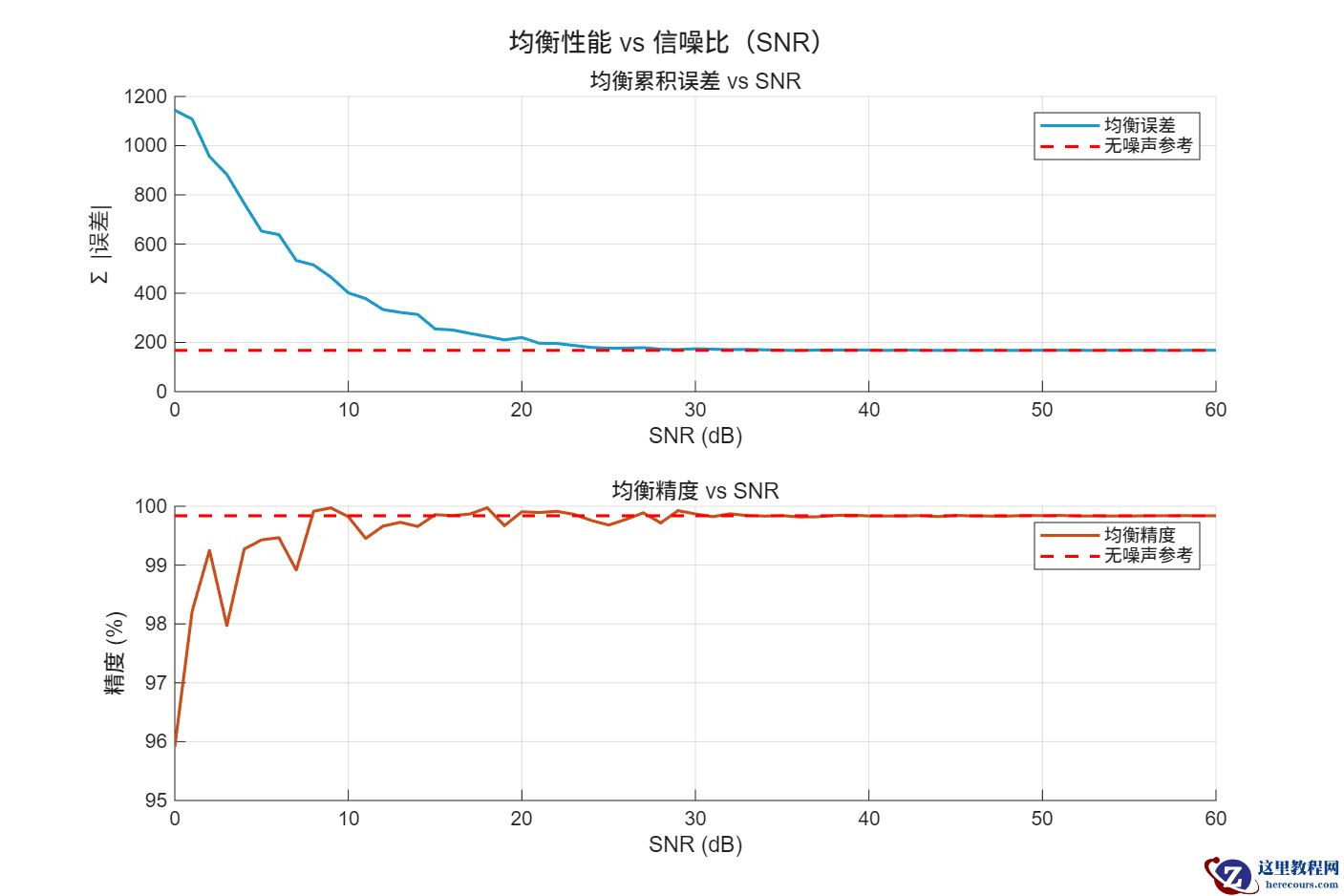
B5 鲁棒性扫描:
SNR、阶数
M、初值范围
核心观察量:
e[n]、
h_track、
overall_lti_track、测试精度。
C 链路:CMA 盲均衡
-
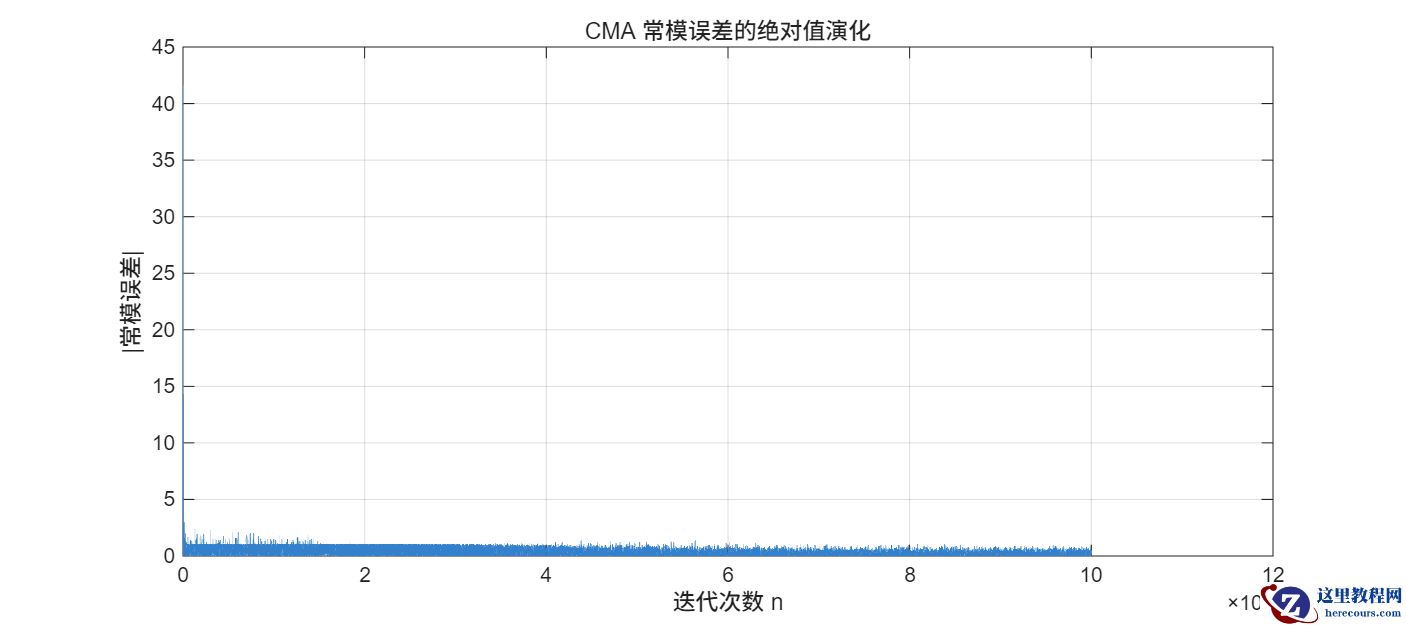
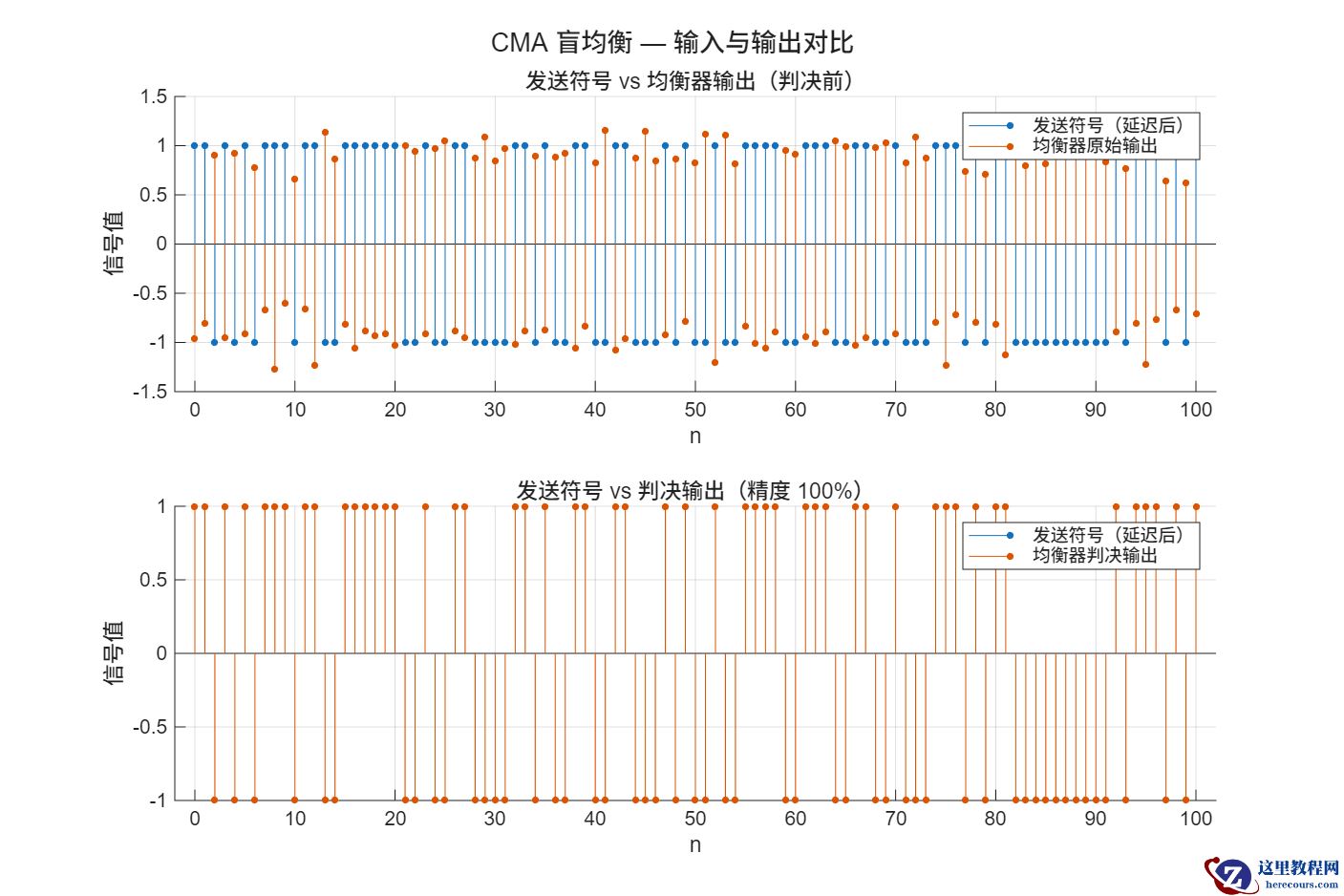
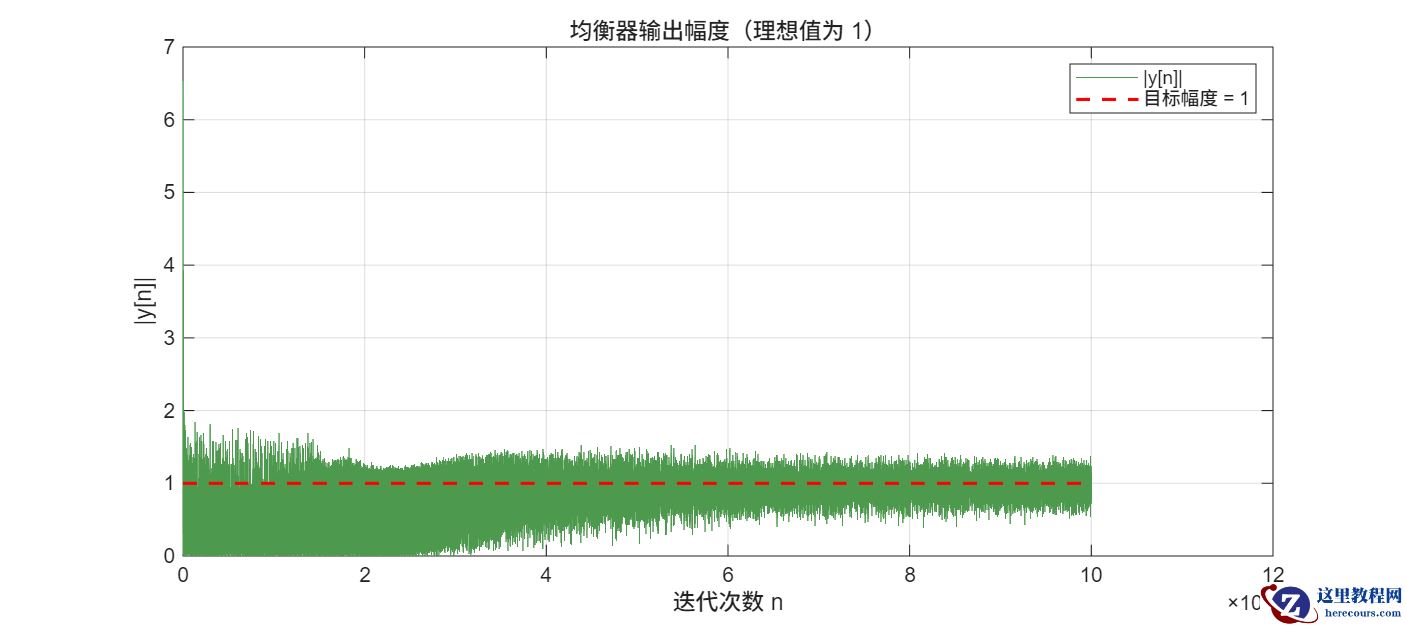
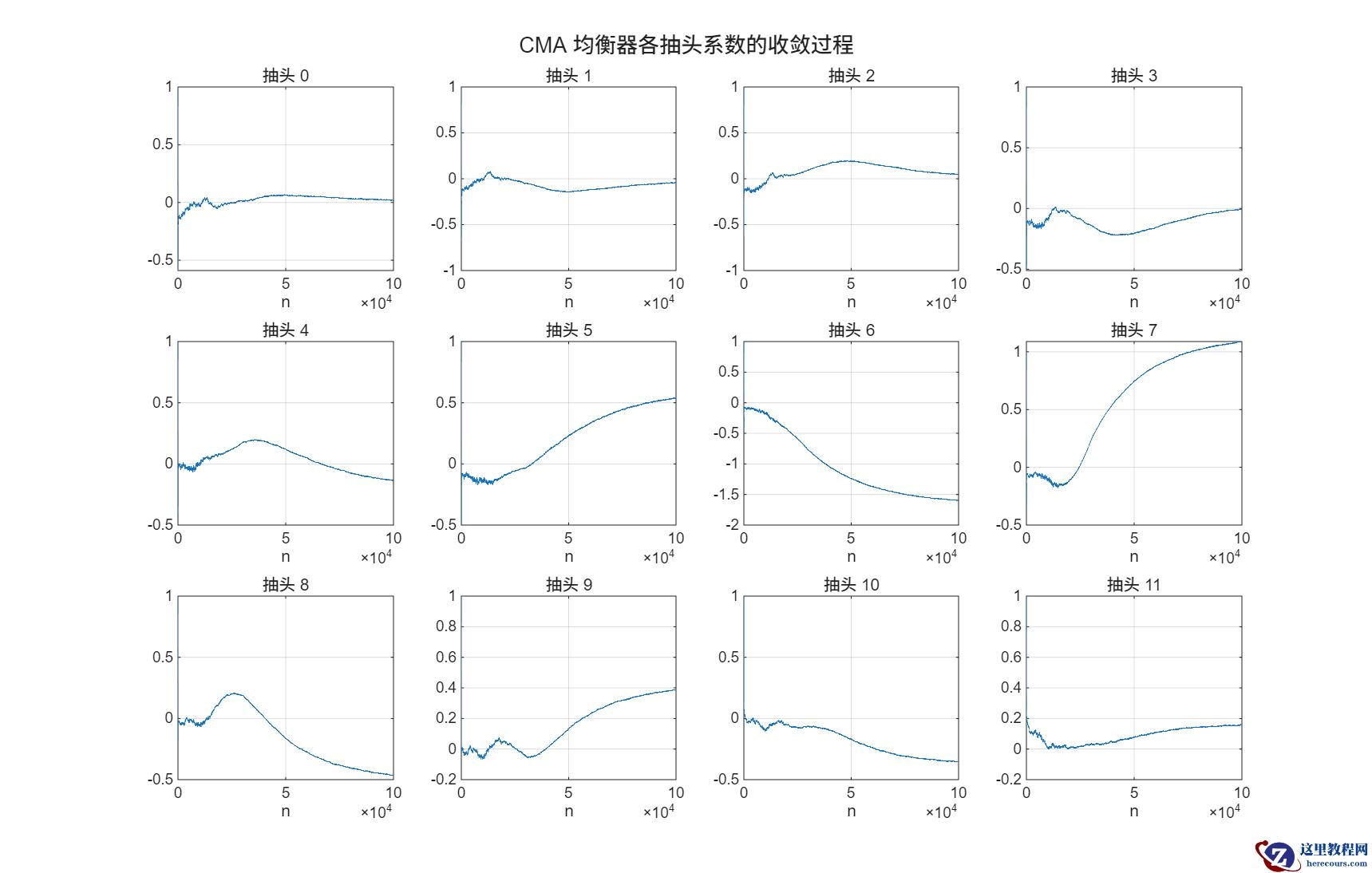
C1 盲均衡主流程:10 万样本在线迭代
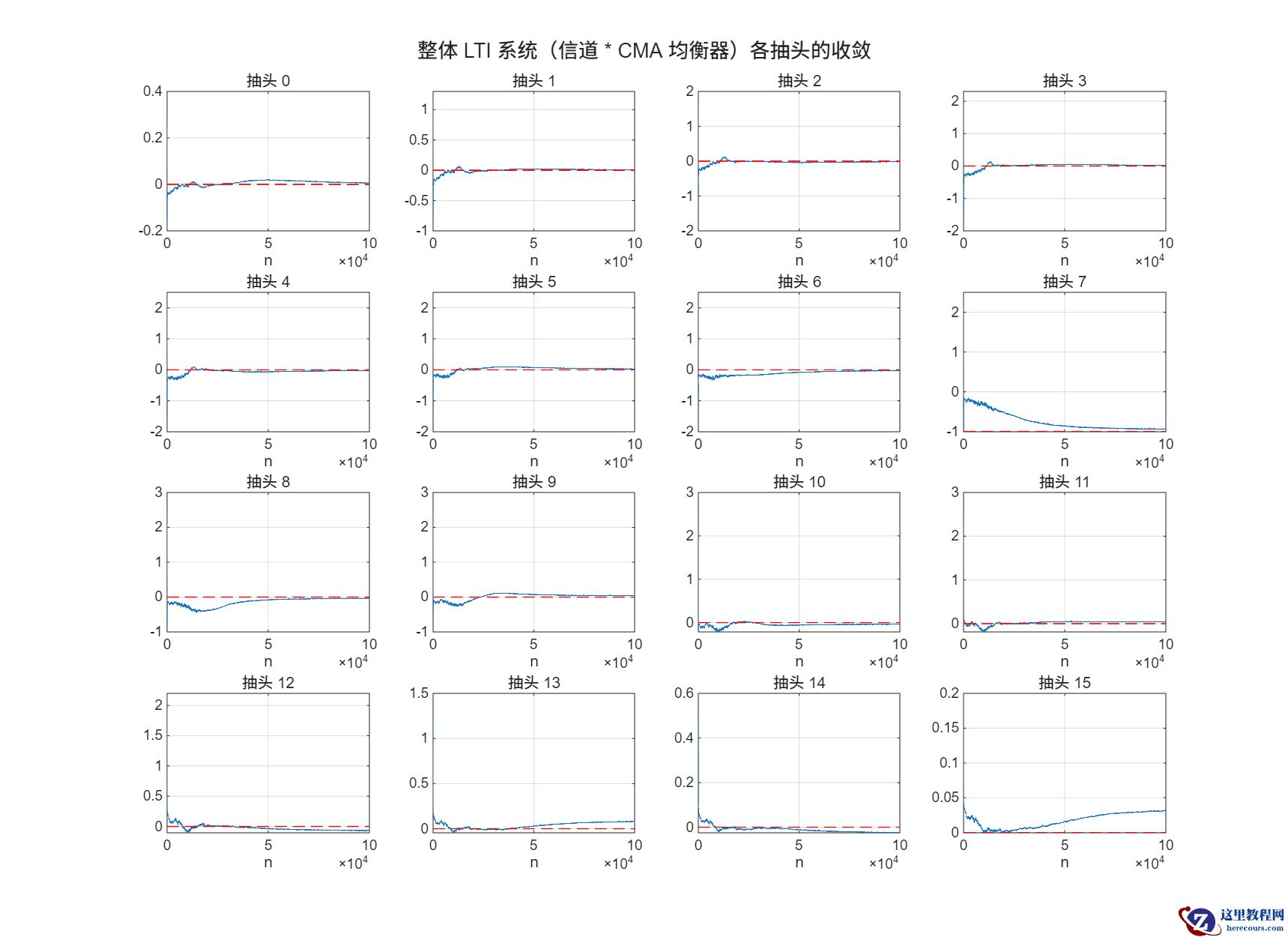
C2 收敛分析:抽头与整体 LTI 演化
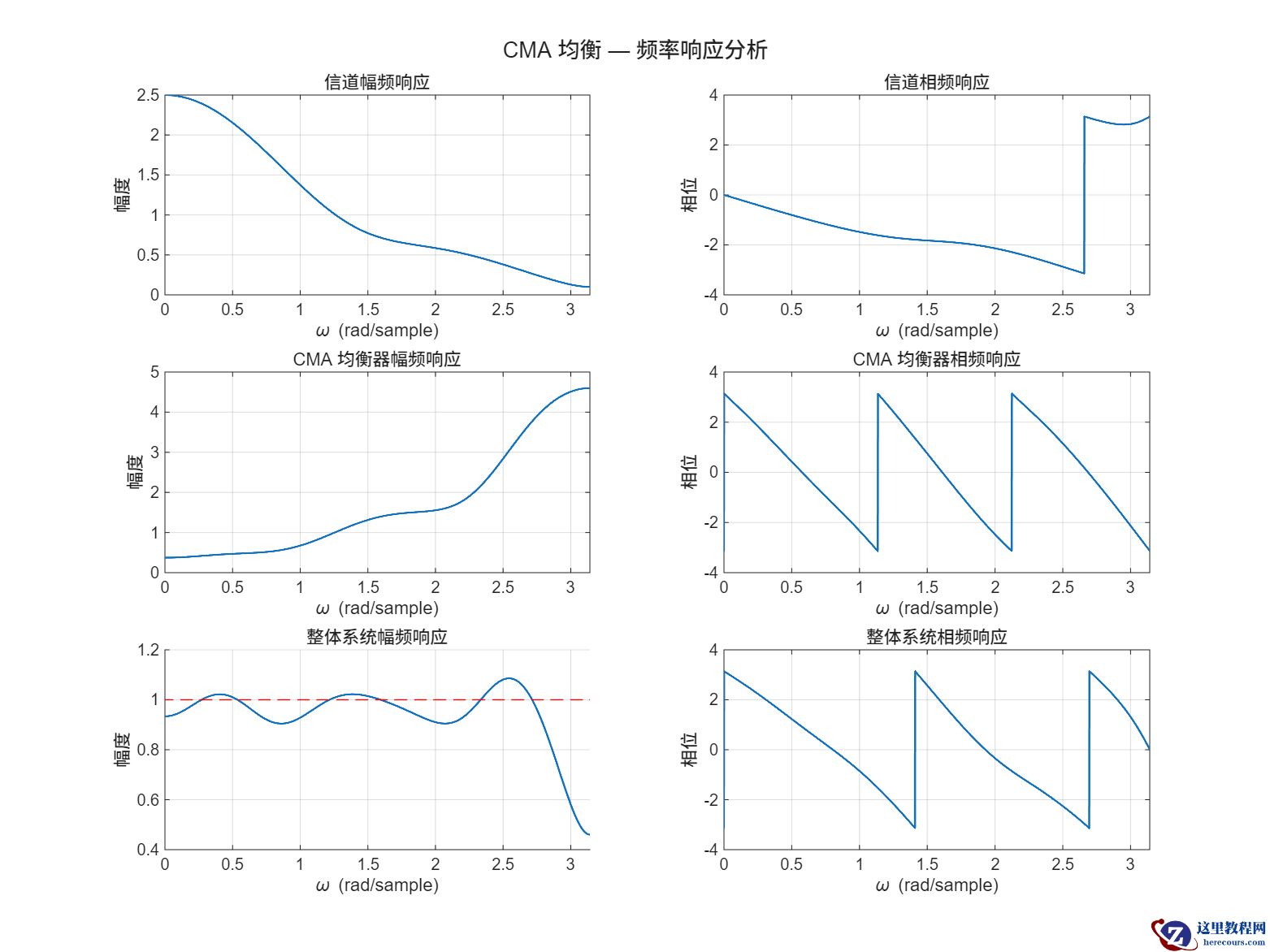
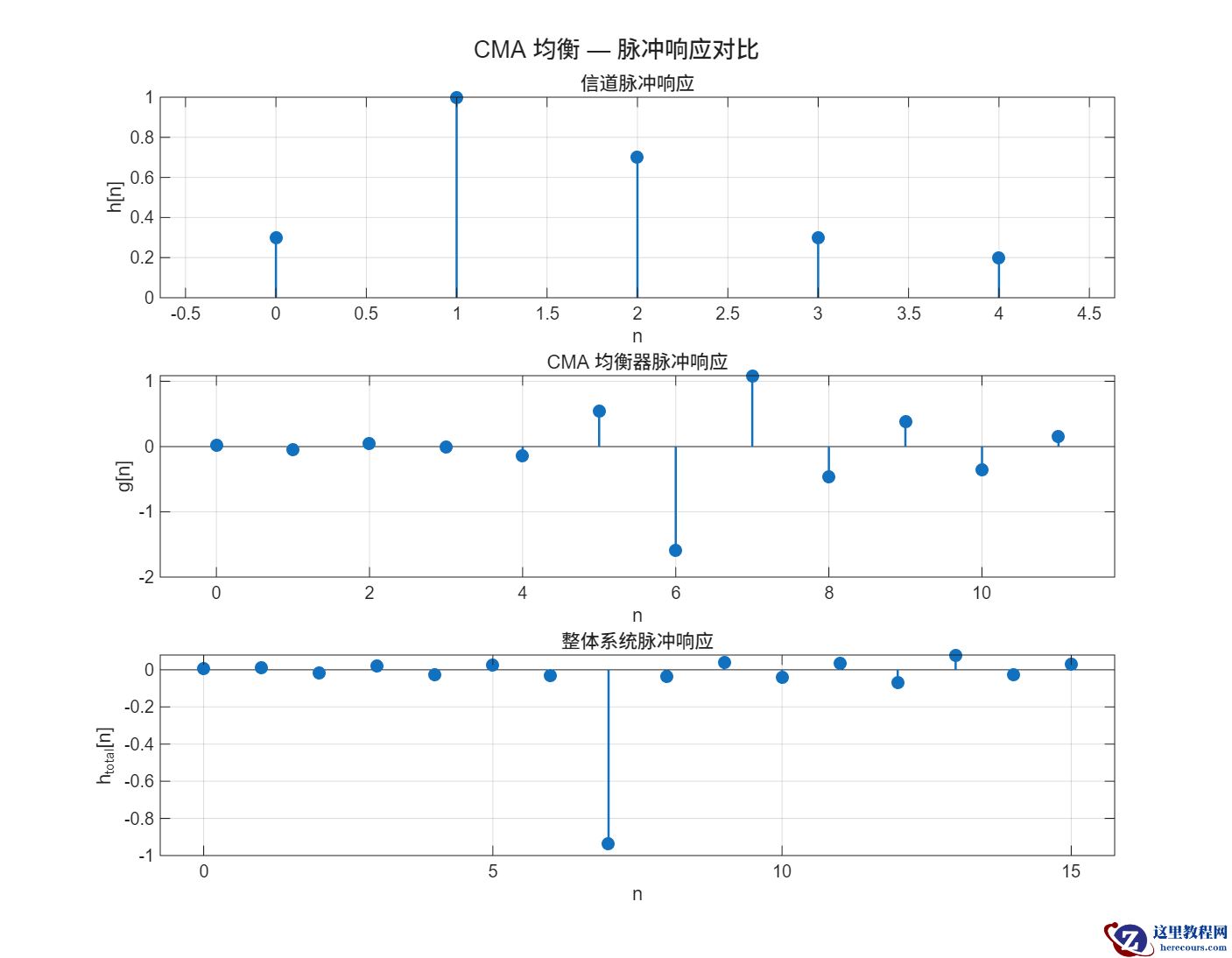
C3 频域与脉冲响应:均衡器频率补偿效果
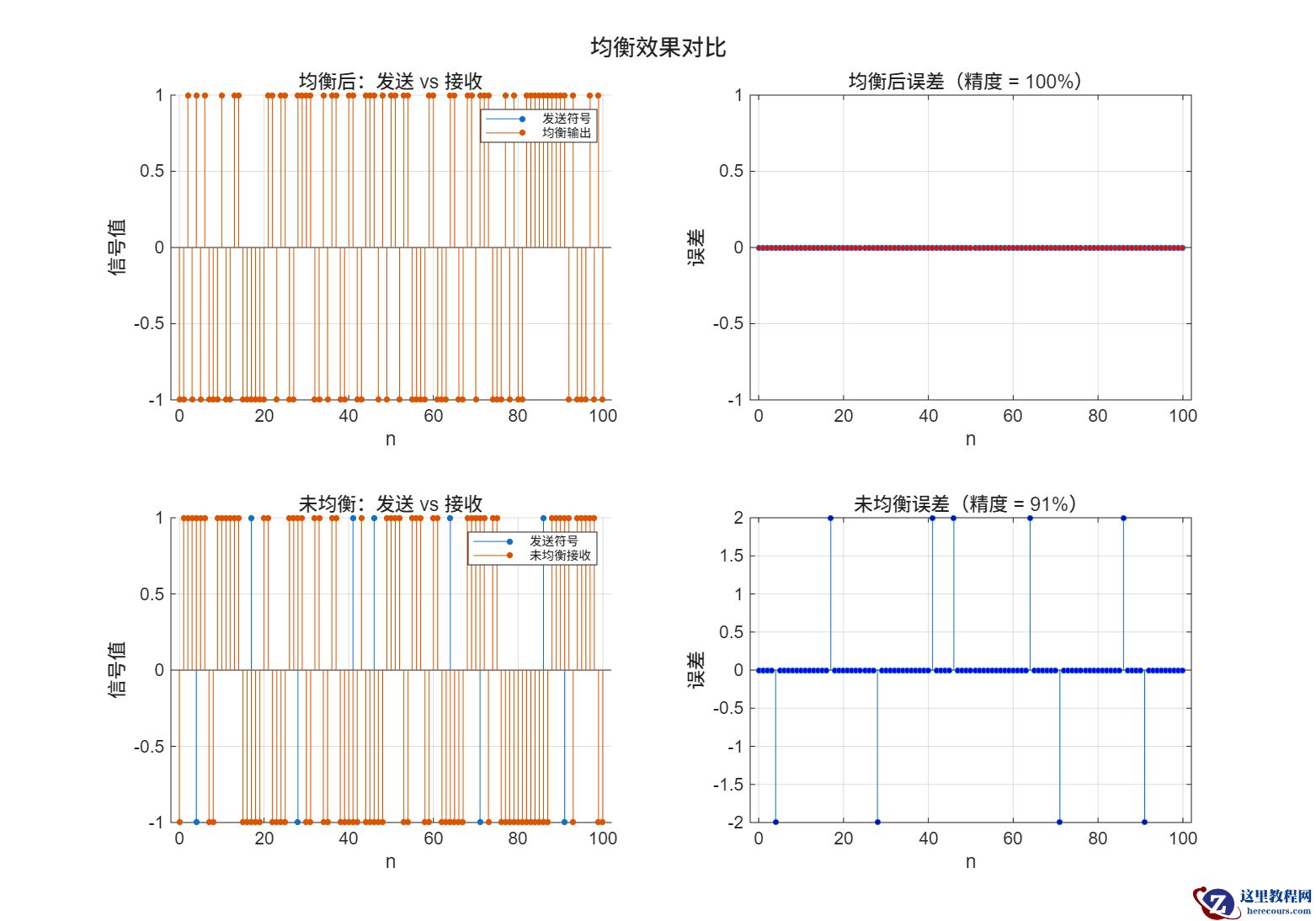
C4 对比分析:均衡前后误差对比
核心观察量:
E_cm、
|y|常模收敛、
phase_flip极性修正。
???? 参数覆盖与可观测指标
| 模块 | 关键参数 | 覆盖范围 | 主要输出指标 || ------ | ----------------------------------------- | ------------------------------------------------------------ | -------------------------------------------- || ANF |
mu,
r,
f_noise|
mu=1e-6~1e-5,
r=0.85~0.95,
f=30/40/45/60Hz| 频谱陷波效果、
a[n]收敛、频率跟踪曲线 || LMS |
M,
mu,
SNR,
h_init|
M=3~23,
SNR=0~60dB,
h_init=-2000~2000| 误差曲线、精度曲线、整体 LTI 收敛 || CMA |
M,
mu_cma,
N|
M=11,
mu=2e-4,
N=1e5| 常模误差、输出幅值收敛、相位翻转修正后精度 |
???? 核心代码展示
???? 自适应陷波更新(
adaptive_notch_filter.m
)
% 误差信号(FIR 零点部分) e_n = xn + a_vec(n) * xn_1 + xn_2; % 输出信号(IIR 极点部分) y(n) = e_n - r * a_vec(n) * yn_1 - r^2 * yn_2; % LMS 更新 a_vec(n+1) = a_vec(n) - mu * y(n) * xn_1; % 稳定性约束 if (a_vec(n+1) > 2) || (a_vec(n+1) < -2) a_vec(n+1) = 0; end
???? LMS 均衡更新(
lms_equalizer.m
)
% 构造当前输入向量(翻转+零填充) num_available = min(n, M + 1); xf(:) = 0; xf(1:num_available) = flip(xn(max(1, n - M):n)); % 均衡输出 y(n) = sum(xf .* h); % 误差与权重更新 e(n) = sn_delayed(n) - y(n); h = h + 2 * mu * e(n) .* xf;
???? CMA 盲均衡与相位修正(
demo_cma_equalizer.m
)
% CMA 更新(实值BPSK形式) e(n_idx) = y(n_idx)^2 - 1; h = h - 4 * mu_cma * e(n_idx) * y(n_idx) .* xf; % 相位/极性二义性修正 match_pos = sum(in_check == out_check); match_neg = sum(in_check == -out_check); if match_neg > match_pos phase_flip = -1; else phase_flip = 1; end
???? 一键运行
>> cd notch_filter % 一键运行全部实验 >> run_all_demos % 单独运行模块 >> demo/demo_notch_filter >> demo/demo_lms_equalizer >> demo/demo_cma_equalizer
输出预览
============================================================ 自适应滤波器与均衡器 — 完整演示 ============================================================ >>> [1/3] 启动自适应陷波滤波器演示 ... >>> [2/3] 启动 LMS 自适应均衡器演示 ... >>> [3/3] 启动 CMA 常模盲均衡器演示 ... ============================================================ 全部演示运行完毕! 图片输出位置: 陷波滤波器 → output/notch_filter/ LMS 均衡器 → output/lms_equalizer/ CMA 均衡器 → output/cma_equalizer/ ============================================================
????️ 运行环境
-
MATLAB 版本:R2020a 或更高版本
依赖工具箱(建议):
wgn) Signal Processing Toolbox(
zplane)
???? 获取方式
本文代码仅为核心片段,完整版工程已整理好。 关注公众号 【 3GPP 仿真实验室】进行获取。







")