1 栽植机构的工作原理
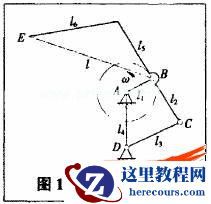
栽植机在进行栽植工作时,栽植机构进行栽植的同时栽植机还需要进行直线运动。因此,秧针的实际运动是栽植机构运动和栽梢机直线运动的合成运动。栽植机构为典型的曲柄摇杆机构如图1中AB为曲柄,EBG为连杆即栽植臂及秧针、DC为摇杆、AD为机架。机构运动是曲柄AB为原动件以角速W绕点A逆时针作匀速圆周运动。
2 COSMOS Motion秧针前端点轨迹模拟
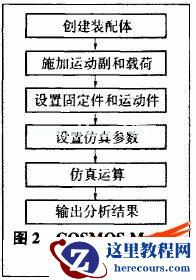
采用COSMOS Motion的机构仿真步骤如图2所示。
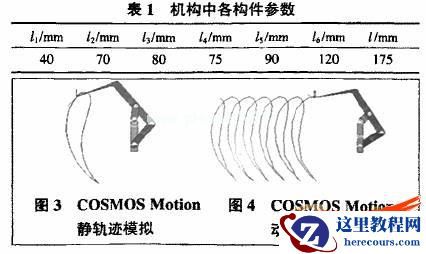
为了便于分析,栽植机构的构件尺寸参数如表to假设栽植机前进速度为v=150mm/s,运动时间t=2s.
利用COSMOS Motion对秧针端点运动轨迹进行运动模拟。首先用SolidWork,对机构进行三维造型和装配,然后用与SolidWorks无缝集成的COSMOS Motion三维动力学仿真软件添加运动、约束、力、碰撞等等参数,对该机构进行运动仿真模拟,用图形形式输出秧针端点E运动轨迹图,如图3、图4所示。
3 COSMCJS Motion秧针前端点速度与加速度分析
应用COSMOS Motion模拟速度输出结果,如图5、图6所示。
应用COSMOS Motion模拟速度输出结果,如图7、图8所示。
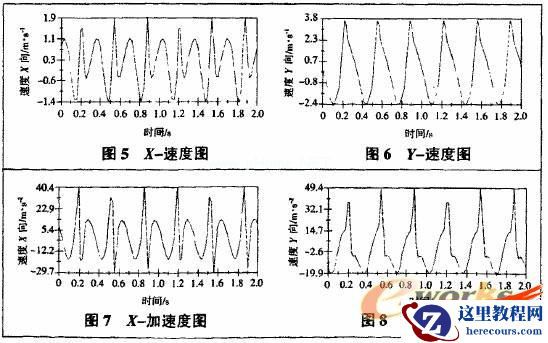
从上述X,Y轴的速度及加速度图可以看到速度变化情况,同时可以得到秧针在工作过程中的速度及加速度的数值大小。根据栽植机作业要求可以改变机构参数来改变速度及加速度的数值。
4 结论
本文应用SolidWorks,对机构进行三维造型和装配。然后用与SolidWorks、无缝集成的COSMOS Motion三维动力学仿真软件对该栽植机构秧针前端点的运动轨迹进行模拟,用轨迹跟踪的形式显示出轨迹图。这种方法直观地表现出分插机构秧针前端点的运动轨迹。同时分析秧针端点E的理论运动速度及加速度。为合理选择栽植机构的结构参数提供依据,同时也可以提高机构的设计效率。
投稿或有疑问请联系:MSN:kangta868@hotmail.com QQ:1090219530














